目錄
- 前言
- 1. 效果圖
- 2. 原理
- 2.1 什么是光流?光流追蹤的前提、原理
- 2.2 光流的應(yīng)用
- 2.3 光流的2種方法
- 3. 源碼
- 3.2 稀疏光流追蹤
- 3.2 優(yōu)化版稀疏光流追蹤
- 3.3 密集光流追蹤
- 總結(jié)
前言
這篇博客將介紹光流的概念以及如何使用 Lucas-Kanade 方法估計(jì)光流,并演示如何使用 cv2.calcOpticalFlowPyrLK() 來跟蹤視頻中的特征點(diǎn)。
1. 效果圖
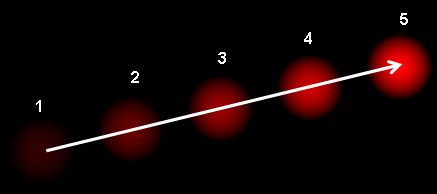
光流追蹤效果圖如下:
它顯示了一個(gè)球在連續(xù) 5 幀中移動(dòng)。箭頭表示其位移矢量。
不是很嚴(yán)謹(jǐn)?shù)摹∈韫饬魈卣鼽c(diǎn)追蹤效果圖如下:
它追蹤了視頻中多個(gè)車的主駕駛、副駕駛,以及行人的邊緣角點(diǎn)的軌跡:
此代碼不檢查下一個(gè)關(guān)鍵點(diǎn)的正確程度。因此即使圖像中的任何特征點(diǎn)消失,光流也有可能找到下一個(gè)看起來可能靠近它的點(diǎn)。對于穩(wěn)健的跟蹤,角點(diǎn)應(yīng)該在特定的時(shí)間間隔內(nèi)檢測點(diǎn)。

過程圖其一如下:

優(yōu)化版的——稀疏光流特征點(diǎn)追蹤效果如下:
找到特征點(diǎn),每 30 幀對光流點(diǎn)向后檢查,只保留還存在于屏幕中的特征點(diǎn)。不會(huì)存在如上圖車已經(jīng)過去了,還留存有長長的不正確的軌跡追蹤線。

過程圖其一如下:

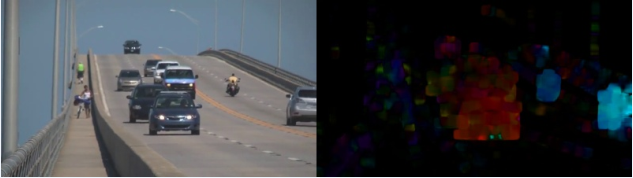
原圖 VS 密集光流追蹤 gif 效果圖如下:

原圖 VS 密集光流Hsv效果圖其一如下:
2. 原理
2.1 什么是光流?光流追蹤的前提、原理
光流是由物體或相機(jī)的運(yùn)動(dòng)引起的圖像物體在連續(xù)兩幀之間的明顯運(yùn)動(dòng)的模式。它是 2D 矢量場,其中每個(gè)矢量是一個(gè)位移矢量,顯示點(diǎn)從第一幀到第二幀的移動(dòng)。
光流追蹤的前提是:1. 對象的像素強(qiáng)度在連續(xù)幀之間不會(huì)改變;2. 相鄰像素具有相似的運(yùn)動(dòng)。
光流追蹤的原理:
cv2.goodFeaturesToTrack() :Shi-Tomasi 角點(diǎn)檢測器確定要追蹤的特征點(diǎn)
cv2.calcOpticalFlowPyrLK(): 追蹤視頻中的稀疏特征點(diǎn)
cv2.calcOpticalFlowFarneback(): 追蹤視頻中的密集特征點(diǎn)
取第一幀,檢測其中的一些 Shi-Tomasi 角點(diǎn),使用 Lucas-Kanade 光流迭代跟蹤這些點(diǎn)。對于函數(shù) cv2.calcOpticalFlowPyrLK() 傳遞前一幀、前一個(gè)點(diǎn)和下一幀。它返回下一個(gè)點(diǎn)以及一些狀態(tài)編號(hào),如果找到下一個(gè)點(diǎn),則值為 1,否則為零。然后在下一步中迭代地將這些下一個(gè)點(diǎn)作為前一個(gè)點(diǎn)傳遞。
使用 Harris 角點(diǎn)檢測器 檢查逆矩陣的相似性。它表示角點(diǎn)是更好的跟蹤點(diǎn)。
Shi-Tomasi 角點(diǎn)檢測器 比 Harris 角點(diǎn)檢測器效果更好一些;
2.2 光流的應(yīng)用
光流在以下領(lǐng)域有許多應(yīng)用:
- 運(yùn)動(dòng)的結(jié)構(gòu)
- 視頻壓縮
- 視頻穩(wěn)定
2.3 光流的2種方法
OpenCV提供了倆種算法計(jì)算光流,分別通過:cv2.calcOpticalFlowPyrLK()、cv2.calcOpticalFlowFarneback實(shí)現(xiàn);
- 稀疏光流: 通過 Lucas-Kanade 方法計(jì)算稀疏特征集的光流(使用 Shi-Tomasi 算法檢測到的角點(diǎn))。
- 密集光流: 通過 Gunner Farneback 來尋找密集光流。它計(jì)算幀中所有點(diǎn)的光流。
稀疏光流計(jì)算:
該方法傳遞前一幀、前一個(gè)點(diǎn)和下一幀;
它返回下一個(gè)點(diǎn)以及一些狀態(tài)編號(hào),如果找到下一個(gè)點(diǎn),則值為 1,否則為零。
p1, st, err = cv2.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, winSize=(15, 15), maxLevel=2, criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
- old_gray: 上一幀單通道灰度圖
- frame_gray: 下一幀單通道灰度圖
- prePts:p0上一幀坐標(biāo)pts
- nextPts: None
- winSize: 每個(gè)金字塔級別上搜索窗口的大小
- maxLevel: 最大金字塔層數(shù)
- criteria:指定迭代搜索算法的終止條件,在指定的最大迭代次數(shù) 10 之后或搜索窗口移動(dòng)小于 0.03
密集光流計(jì)算:
該方法將得到一個(gè)帶有光流向量 (u,v) 的 2 通道陣列。可以找到它們的大小和方向,然后對結(jié)果進(jìn)行顏色編碼以實(shí)現(xiàn)更好的可視化。
在HSV圖像中,方向?qū)?yīng)于圖像的色調(diào),幅度對應(yīng)于價(jià)值平面。
flow = cv2.calcOpticalFlowFarneback(prvs, next, None, 0.5, 3, 15, 3, 5, 1.2, 0)
- prvs: 上一幀單通道灰度圖
- next: 下一幀單通道灰度圖
- flow: 流 None
- pyr_scale: 0.5經(jīng)典金字塔,構(gòu)建金字塔縮放scale
- level:3 初始圖像的金字塔層數(shù)
- winsize:3 平均窗口大小,數(shù)值越大,算法對圖像的魯棒性越強(qiáng)
- iterations:15 迭代次數(shù)
- poly_n:5 像素鄰域的參數(shù)多邊形大小,用于在每個(gè)像素中找到多項(xiàng)式展開式;較大的值意味著圖像將使用更平滑的曲面進(jìn)行近似,從而產(chǎn)生更高的分辨率、魯棒算法和更模糊的運(yùn)動(dòng)場;通常多邊形n=5或7。
- poly_sigma:1.2 高斯標(biāo)準(zhǔn)差,用于平滑導(dǎo)數(shù)
- flags: 可以是以下操作標(biāo)志的組合:OPTFLOW_USE_INITIAL_FLOW:使用輸入流作為初始流近似值。OPTFLOW_FARNEBACK_GAUSSIAN: 使用GAUSSIAN過濾器而不是相同尺寸的盒過濾器;
3. 源碼
3.2 稀疏光流追蹤
# 光流追蹤
# 光流追蹤的前提是:1. 對象的像素強(qiáng)度在連續(xù)幀之間不會(huì)改變;2. 相鄰像素具有相似的運(yùn)動(dòng)。
# - cv2.goodFeaturesToTrack() 確定要追蹤的特征點(diǎn)
# - cv2.calcOpticalFlowPyrLK() 追蹤視頻中的特征點(diǎn)
# 取第一幀,檢測其中的一些 Shi-Tomasi 角點(diǎn),使用 Lucas-Kanade 光流迭代跟蹤這些點(diǎn)。
# 對于函數(shù) cv2.calcOpticalFlowPyrLK() 傳遞前一幀、前一個(gè)點(diǎn)和下一幀。它返回下一個(gè)點(diǎn)以及一些狀態(tài)編號(hào),如果找到下一個(gè)點(diǎn),則值為 1,否則為零。
# 然后在下一步中迭代地將這些下一個(gè)點(diǎn)作為前一個(gè)點(diǎn)傳遞。
# USAGE
# python video_optical_flow.py
import imutils
import numpy as np
import cv2
cap = cv2.VideoCapture('images/slow_traffic_small.mp4')
# ShiTomasi角點(diǎn)檢測的參數(shù)
feature_params = dict(maxCorners=100,
qualityLevel=0.3,
minDistance=7,
blockSize=7)
# Lucas Kanada光流檢測的參數(shù)
lk_params = dict(winSize=(15, 15),
maxLevel=2,
criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
# 構(gòu)建隨機(jī)顏色
color = np.random.randint(0, 255, (100, 3))
# 獲取第一幀并發(fā)現(xiàn)角點(diǎn)
ret, old_frame = cap.read()
old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY)
p0 = cv2.goodFeaturesToTrack(old_gray, mask=None, **feature_params)
# 為繪制光流追蹤圖,構(gòu)建一個(gè)Mask
mask = np.zeros_like(old_frame)
num = 0
while (1):
ret, frame = cap.read()
if not ret:
break
frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 使用迭代Lucas Kanade方法計(jì)算稀疏特征集的光流
# - old_gray: 上一幀單通道灰度圖
# - frame_gray: 下一幀單通道灰度圖
# - prePts:p0上一幀坐標(biāo)pts
# - nextPts: None
# - winSize: 每個(gè)金字塔級別上搜索窗口的大小
# - maxLevel: 最大金字塔層數(shù)
# - criteria:指定迭代搜索算法的終止條件,在指定的最大迭代次數(shù)criteria.maxCount之后或搜索窗口移動(dòng)小于criteria.epsilon
p1, st, err = cv2.calcOpticalFlowPyrLK(old_gray, frame_gray, p0, None, **lk_params)
# 選擇軌跡點(diǎn)
good_new = p1[st == 1]
good_old = p0[st == 1]
# 繪制軌跡
for i, (new, old) in enumerate(zip(good_new, good_old)):
a, b = new.ravel()
c, d = old.ravel()
mask = cv2.line(mask, (a, b), (c, d), color[i].tolist(), 2)
frame = cv2.circle(frame, (a, b), 5, color[i].tolist(), -1)
img = cv2.add(frame, mask)
cv2.imshow('frame', img)
cv2.imwrite('videoof-imgs/' + str(num) + '.jpg', imutils.resize(img, 500))
print(str(num))
num = num + 1
k = cv2.waitKey(30) 0xff
if k == 27:
break
# 更新之前的幀和點(diǎn)
old_gray = frame_gray.copy()
p0 = good_new.reshape(-1, 1, 2)
cv2.destroyAllWindows()
cap.release()
3.2 優(yōu)化版稀疏光流追蹤
# 優(yōu)化后的光流追蹤—Lucas-Kanade tracker
# (當(dāng)不見檢查下一個(gè)關(guān)鍵點(diǎn)的正確程度時(shí),即使圖像中的任何特征點(diǎn)消失,光流也有可能找到下一個(gè)看起來可能靠近它的點(diǎn)。實(shí)際上對于穩(wěn)健的跟蹤,角點(diǎn)應(yīng)該在特定的時(shí)間間隔內(nèi)檢測點(diǎn)。
# 找到特征點(diǎn)后,每 30 幀對光流點(diǎn)的向后檢查,只選擇好的。)
# Lucas Kanade稀疏光流演示。使用GoodFeatures跟蹤用于跟蹤初始化和匹配驗(yàn)證的回溯幀之間。
# Lucas-Kanade sparse optical flow demo. Uses goodFeaturesToTrack for track initialization and back-tracking for match verification between frames.
# Usage
# pyhton lk_track.py images/slow_traffic_small.mp4
# 按 ESC鍵退出
from __future__ import print_function
import imutils
import numpy as np
import cv2
def draw_str(dst, target, s):
x, y = target
cv2.putText(dst, s, (x + 1, y + 1), cv2.FONT_HERSHEY_PLAIN, 1.0, (0, 0, 0), thickness=2, lineType=cv2.LINE_AA)
cv2.putText(dst, s, (x, y), cv2.FONT_HERSHEY_PLAIN, 1.0, (255, 255, 255), lineType=cv2.LINE_AA)
lk_params = dict(winSize=(15, 15),
maxLevel=2,
criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))
feature_params = dict(maxCorners=500,
qualityLevel=0.3,
minDistance=7,
blockSize=7)
class App:
def __init__(self, video_src):
self.track_len = 10
self.detect_interval = 30
self.tracks = []
self.cam = cv2.VideoCapture(video_src)
self.frame_idx = 0
def run(self):
while True:
_ret, frame = self.cam.read()
if not _ret:
break
frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
vis = frame.copy()
if len(self.tracks) > 0:
img0, img1 = self.prev_gray, frame_gray
p0 = np.float32([tr[-1] for tr in self.tracks]).reshape(-1, 1, 2)
p1, _st, _err = cv2.calcOpticalFlowPyrLK(img0, img1, p0, None, **lk_params)
p0r, _st, _err = cv2.calcOpticalFlowPyrLK(img1, img0, p1, None, **lk_params)
d = abs(p0 - p0r).reshape(-1, 2).max(-1)
good = d 1
new_tracks = []
for tr, (x, y), good_flag in zip(self.tracks, p1.reshape(-1, 2), good):
if not good_flag:
continue
tr.append((x, y))
if len(tr) > self.track_len:
del tr[0]
new_tracks.append(tr)
cv2.circle(vis, (x, y), 2, (0, 255, 0), -1)
self.tracks = new_tracks
cv2.polylines(vis, [np.int32(tr) for tr in self.tracks], False, (0, 255, 0))
draw_str(vis, (20, 20), 'track count: %d' % len(self.tracks))
if self.frame_idx % self.detect_interval == 0:
mask = np.zeros_like(frame_gray)
mask[:] = 255
for x, y in [np.int32(tr[-1]) for tr in self.tracks]:
cv2.circle(mask, (x, y), 5, 0, -1)
p = cv2.goodFeaturesToTrack(frame_gray, mask=mask, **feature_params)
if p is not None:
for x, y in np.float32(p).reshape(-1, 2):
self.tracks.append([(x, y)])
self.prev_gray = frame_gray
cv2.imshow('lk_track', vis)
print(self.frame_idx)
cv2.imwrite('videoOof-imgs/' + str(self.frame_idx) + '.jpg', imutils.resize(vis, 500))
self.frame_idx += 1
ch = cv2.waitKey(1)
if ch == 27:
break
def main():
import sys
try:
video_src = sys.argv[1]
except:
video_src = 0
App(video_src).run()
print('Done')
if __name__ == '__main__':
print(__doc__)
main()
cv2.destroyAllWindows()
3.3 密集光流追蹤
# OpenCV中的密集光流
# Lucas-Kanade 方法計(jì)算稀疏特征集的光流(使用 Shi-Tomasi 算法檢測到的角點(diǎn))。
# OpenCV 提供了另一種算法: Gunner Farneback 來尋找密集光流。它計(jì)算幀中所有點(diǎn)的光流。
# 通過cv2.calcOpticalFlowFarneback() 將得到一個(gè)帶有光流向量 (u,v) 的 2 通道陣列。可以找到它們的大小和方向,然后對結(jié)果進(jìn)行顏色編碼以實(shí)現(xiàn)更好的可視化。
# 在HSV圖像中,方向?qū)?yīng)于圖像的色調(diào),幅度對應(yīng)于價(jià)值平面。
import cv2
import imutils
import numpy as np
cap = cv2.VideoCapture('images/slow_traffic_small.mp4')
ret, frame1 = cap.read()
prvs = cv2.cvtColor(frame1, cv2.COLOR_BGR2GRAY)
hsv = np.zeros_like(frame1)
hsv[..., 1] = 255
num = 0
while (1):
ret, frame2 = cap.read()
if not ret:
break
next = cv2.cvtColor(frame2, cv2.COLOR_BGR2GRAY)
# 使用迭代Gunner Farneback 方法計(jì)算密集特征的光流
# - prvs: 上一幀單通道灰度圖
# - next: 下一幀單通道灰度圖
# - flow: 流 None
# - pyr_scale: 0.5經(jīng)典金字塔,構(gòu)建金字塔縮放scale
# - level:3 初始圖像的金字塔層數(shù)
# - winsize:3 平均窗口大小,數(shù)值越大,算法對圖像的魯棒性越強(qiáng)
# - iterations:15 迭代次數(shù)
# - poly_n:5 像素鄰域的參數(shù)多邊形大小,用于在每個(gè)像素中找到多項(xiàng)式展開式;較大的值意味著圖像將使用更平滑的曲面進(jìn)行近似,從而產(chǎn)生更高的分辨率、魯棒算法和更模糊的運(yùn)動(dòng)場;通常多邊形n=5或7。
# - poly_sigma:1.2 高斯標(biāo)準(zhǔn)差,用于平滑導(dǎo)數(shù)
# - flags: 可以是以下操作標(biāo)志的組合:OPTFLOW_USE_INITIAL_FLOW:使用輸入流作為初始流近似值。OPTFLOW_FARNEBACK_GAUSSIAN: 使用GAUSSIAN過濾器而不是相同尺寸的盒過濾器;
flow = cv2.calcOpticalFlowFarneback(prvs, next, None, 0.5, 3, 15, 3, 5, 1.2, 0)
mag, ang = cv2.cartToPolar(flow[..., 0], flow[..., 1])
hsv[..., 0] = ang * 180 / np.pi / 2
hsv[..., 2] = cv2.normalize(mag, None, 0, 255, cv2.NORM_MINMAX)
rgb = cv2.cvtColor(hsv, cv2.COLOR_HSV2BGR)
cv2.imshow('Origin VS frame2', np.hstack([frame2, rgb]))
cv2.imwrite('dof-imgs/' + str(num) + '.jpg', imutils.resize(np.hstack([frame2, rgb]), 600))
k = cv2.waitKey(30) 0xff
num = num + 1
if k == 27:
break
elif k == ord('s'):
cv2.imwrite('dof-imgs/origin VS dense optical flow HSVres' + str(num) + ".jpg",
imutils.resize(np.hstack([frame2, rgb]), width=800))
prvs = next
cap.release()
cv2.destroyAllWindows()
參考 https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_video/py_lucas_kanade/py_lucas_kanade.html#lucas-kanade
總結(jié)
到此這篇關(guān)于OpenCV中光流以及視頻特征點(diǎn)追蹤的文章就介紹到這了,更多相關(guān)OpenCV光流及視頻特征點(diǎn)追蹤內(nèi)容請搜索腳本之家以前的文章或繼續(xù)瀏覽下面的相關(guān)文章希望大家以后多多支持腳本之家!
您可能感興趣的文章:- Opencv光流運(yùn)動(dòng)物體追蹤詳解
- opencv3/C++實(shí)現(xiàn)光流點(diǎn)追蹤
- python+opencv實(shí)現(xiàn)動(dòng)態(tài)物體追蹤
- 使用OpenCV實(shí)現(xiàn)檢測和追蹤車輛
- 如何用OpenCV -python3實(shí)現(xiàn)視頻物體追蹤
- opencv+arduino實(shí)現(xiàn)物體點(diǎn)追蹤效果
- Python+OpenCV實(shí)現(xiàn)實(shí)時(shí)眼動(dòng)追蹤的示例代碼
- OpenCV3.0+Python3.6實(shí)現(xiàn)特定顏色的物體追蹤
- 淺析Python+OpenCV使用攝像頭追蹤人臉面部血液變化實(shí)現(xiàn)脈搏評估
- OpenCV 顏色追蹤的示例代碼
