import numpy as np
import cv2
class Stitcher:
#拼接函數
def stitch(self, images, ratio=0.75, reprojThresh=4.0,showMatches=False):
#獲取輸入圖片
(imageB, imageA) = images
#檢測A、B圖片的SIFT關鍵特征點,并計算特征描述子
(kpsA, featuresA) = self.detectAndDescribe(imageA)
(kpsB, featuresB) = self.detectAndDescribe(imageB)
# 匹配兩張圖片的所有特征點,返回匹配結果
M = self.matchKeypoints(kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh)
# 如果返回結果為空,沒有匹配成功的特征點,退出算法
if M is None:
return None
# 否則,提取匹配結果
# H是3x3視角變換矩陣
(matches, H, status) = M
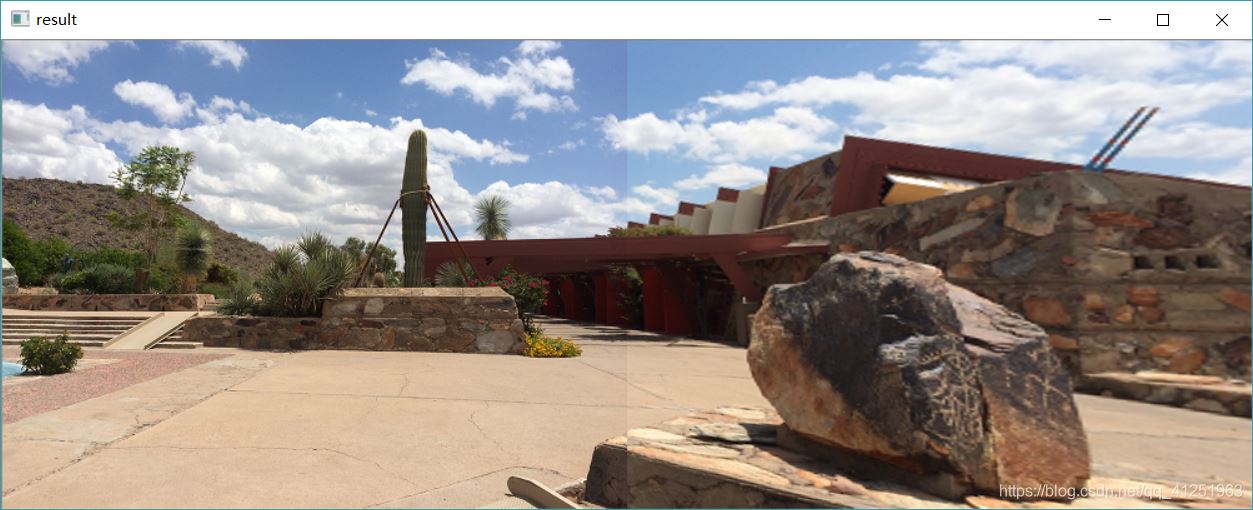
# 將圖片A進行視角變換,result是變換后圖片
result = cv2.warpPerspective(imageA, H, (imageA.shape[1] + imageB.shape[1], imageA.shape[0]))
self.cv_show('result', result)
# 將圖片B傳入result圖片最左端
result[0:imageB.shape[0], 0:imageB.shape[1]] = imageB
self.cv_show('result', result)
# 檢測是否需要顯示圖片匹配
if showMatches:
# 生成匹配圖片
vis = self.drawMatches(imageA, imageB, kpsA, kpsB, matches, status)
# 返回結果
return (result, vis)
# 返回匹配結果
return result
def cv_show(self,name,img):
cv2.imshow(name, img)
cv2.waitKey(0)
cv2.destroyAllWindows()
def detectAndDescribe(self, image):
# 將彩色圖片轉換成灰度圖
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 建立SIFT生成器
descriptor = cv2.xfeatures2d.SIFT_create()
# 檢測SIFT特征點,并計算描述子
(kps, features) = descriptor.detectAndCompute(image, None)
# 將結果轉換成NumPy數組
kps = np.float32([kp.pt for kp in kps])
# 返回特征點集,及對應的描述特征
return (kps, features)
def matchKeypoints(self, kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh):
# 建立暴力匹配器
matcher = cv2.BFMatcher()
# 使用KNN檢測來自A、B圖的SIFT特征匹配對,K=2
rawMatches = matcher.knnMatch(featuresA, featuresB, 2)
matches = []
for m in rawMatches:
# 當最近距離跟次近距離的比值小于ratio值時,保留此匹配對
if len(m) == 2 and m[0].distance m[1].distance * ratio:
# 存儲兩個點在featuresA, featuresB中的索引值
matches.append((m[0].trainIdx, m[0].queryIdx))
# 當篩選后的匹配對大于4時,計算視角變換矩陣
if len(matches) > 4:
# 獲取匹配對的點坐標
ptsA = np.float32([kpsA[i] for (_, i) in matches])
ptsB = np.float32([kpsB[i] for (i, _) in matches])
# 計算視角變換矩陣
(H, status) = cv2.findHomography(ptsA, ptsB, cv2.RANSAC, reprojThresh)
# 返回結果
return (matches, H, status)
# 如果匹配對小于4時,返回None
return None
def drawMatches(self, imageA, imageB, kpsA, kpsB, matches, status):
# 初始化可視化圖片,將A、B圖左右連接到一起
(hA, wA) = imageA.shape[:2]
(hB, wB) = imageB.shape[:2]
vis = np.zeros((max(hA, hB), wA + wB, 3), dtype="uint8")
vis[0:hA, 0:wA] = imageA
vis[0:hB, wA:] = imageB
# 聯合遍歷,畫出匹配對
for ((trainIdx, queryIdx), s) in zip(matches, status):
# 當點對匹配成功時,畫到可視化圖上
if s == 1:
# 畫出匹配對
ptA = (int(kpsA[queryIdx][0]), int(kpsA[queryIdx][1]))
ptB = (int(kpsB[trainIdx][0]) + wA, int(kpsB[trainIdx][1]))
cv2.line(vis, ptA, ptB, (0, 255, 0), 1)
# 返回可視化結果
return vis
到此這篇關于OpenCV全景圖像拼接的實現示例的文章就介紹到這了,更多相關OpenCV 圖像拼接內容請搜索腳本之家以前的文章或繼續瀏覽下面的相關文章希望大家以后多多支持腳本之家!