在源環境中啟動CLion
需要告知CLion ROS特定的環境變量。通過運行來源工作空間時,將在當前shell中檢索這些變量
source ./devel/setup.bash
為CLion提供ROS環境變量的最簡單方法是從同一個shell啟動IDE。在獲取工作空間后,您可以鍵入同一終端:
在CLion中打開一個ROS項目
在源環境中啟動CLion后,執行以下操作之一以打開ROS項目:
- 單擊文件|打開并選擇ROS工作區的src目錄中的CMakeLists.txt,然后選擇Open as Project。
- 單擊文件|來自Sources的新CMake項目,并選擇工作區的src目錄以從中導入項目。
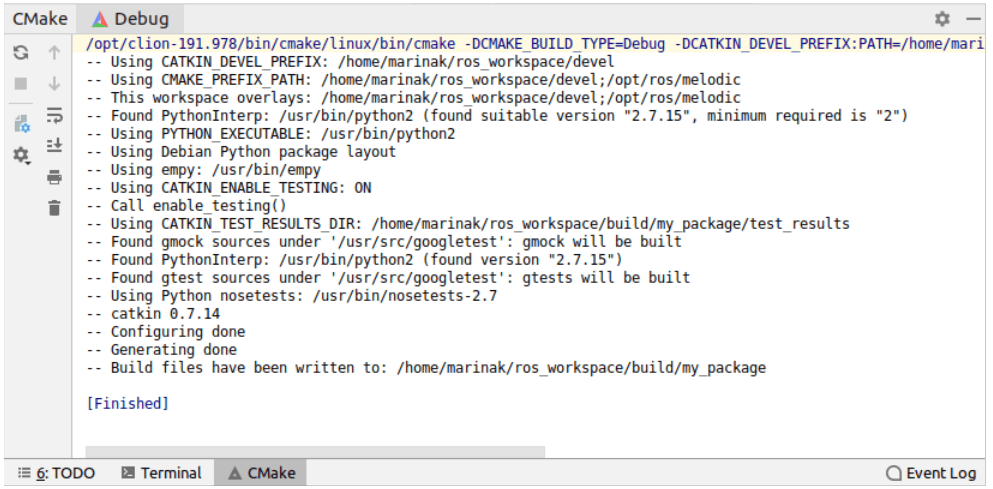
該CMake的工具窗口會顯示該項目加載的狀態:
設置catkin工作空間的構建路徑
默認情況下,CLion將構建輸出放在自動創建的cmake-build-debug或cmake-build-release目錄中。對于ROS開發,這意味著您將在CLion和運行的控制臺中擁有兩個不同的版本catkin_make。
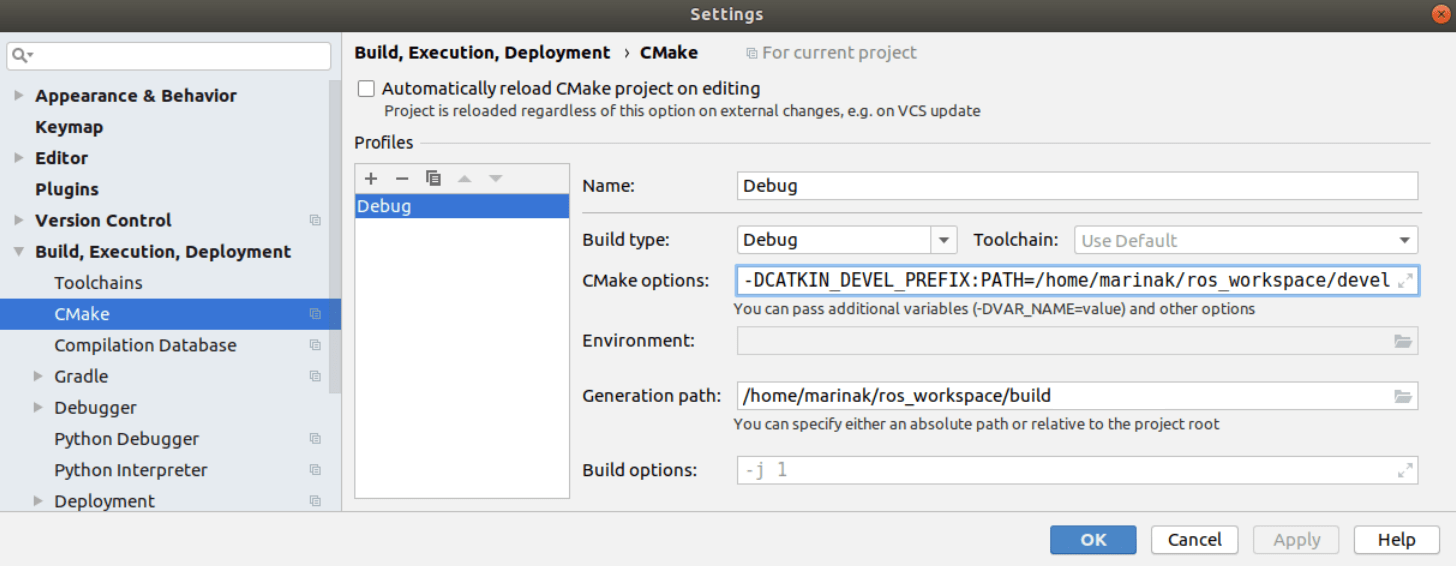
要在IDE和控制臺上進行單一構建,需要將CLion構建路徑設置為catkin工作區目錄。為此,請轉到文件|設置Ctrl+Alt+S|構建,執行,部署|CMake并更改兩個字段:
- 在生成路徑中,設置workspace_folder/build。
- 在CMake選項中,添加-DCATKIN_DEVEL_PREFIX:PATH=workspace_folder/devel。
使用啟動文件
您可以在CLion中將ROS節點作為常規應用程序運行和調試。
啟動文件無法直接執行,但您可以使用XML語法突出顯示和完成編輯它們,并將調試器附加到正在運行的節點。
將調試器附加到正在運行的節點
1、從命令行運行.launch文件。例如
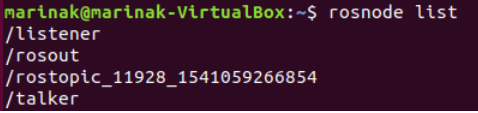
您可以通過該rosnode list命令檢查當前運行的節點列表。在我們的示例中,列表將包含talker和listener:
2、呼叫運行|從主菜單附加到處理或按Ctrl+Alt+F5。
3、通過其PID或名稱連接到所需節點:

示例:創建基本ROS節點,在CLion中編輯并運行它
在這個例子中,我們將創建一個簡單的ROS包,編輯源代碼,并從CLion運行節點。我們將在Ubuntu 18.04上使用ROS Melodic,并在ROS wiki上使用編寫簡單發布者和訂閱者(C ++)教程的基本發布者節點。
創建一個基本的ROS包
創建和構建ROS工作區:
mkdir -p ros_workspace/srccd ros_workspace
catkin_make
在工作區中,創建一個名為my_package的包:
cd src
catkin_create_pkg my_package roscpp rospy std_msgs
啟動CLION
來源工作區:
cd ../../../source ./devel/setup.bash
并在同一終端啟動CLion
sh /opt/clion-2018.2/bin/clion.sh
在CLion中打開包作為項目
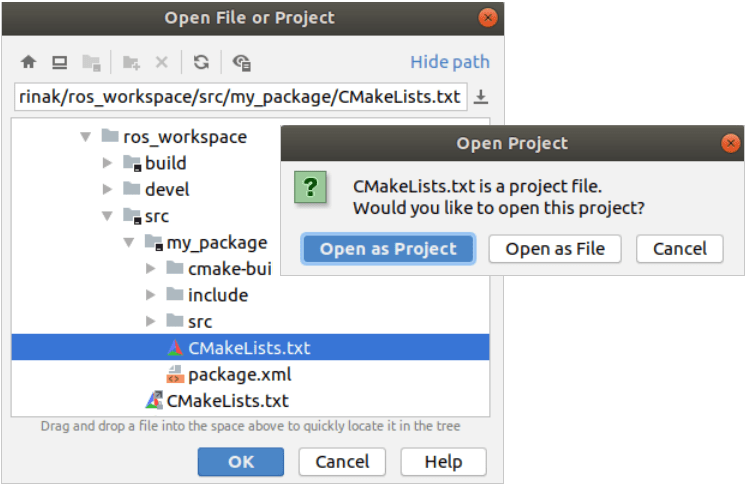
在CLion中,轉到File |打開并選擇位于包文件夾內的CMakeLists.txt文件,然后選擇將其作為項目打開:
添加源文件并編輯CMakeLists.txt
向項目添加新的源文件:右鍵單擊Project樹中的src,選擇New |C / C ++源文件并將其命名為my_package.cpp。
將整個talker.cpp文件從Publisher和Subscriber教程復制到my_package.cpp中。
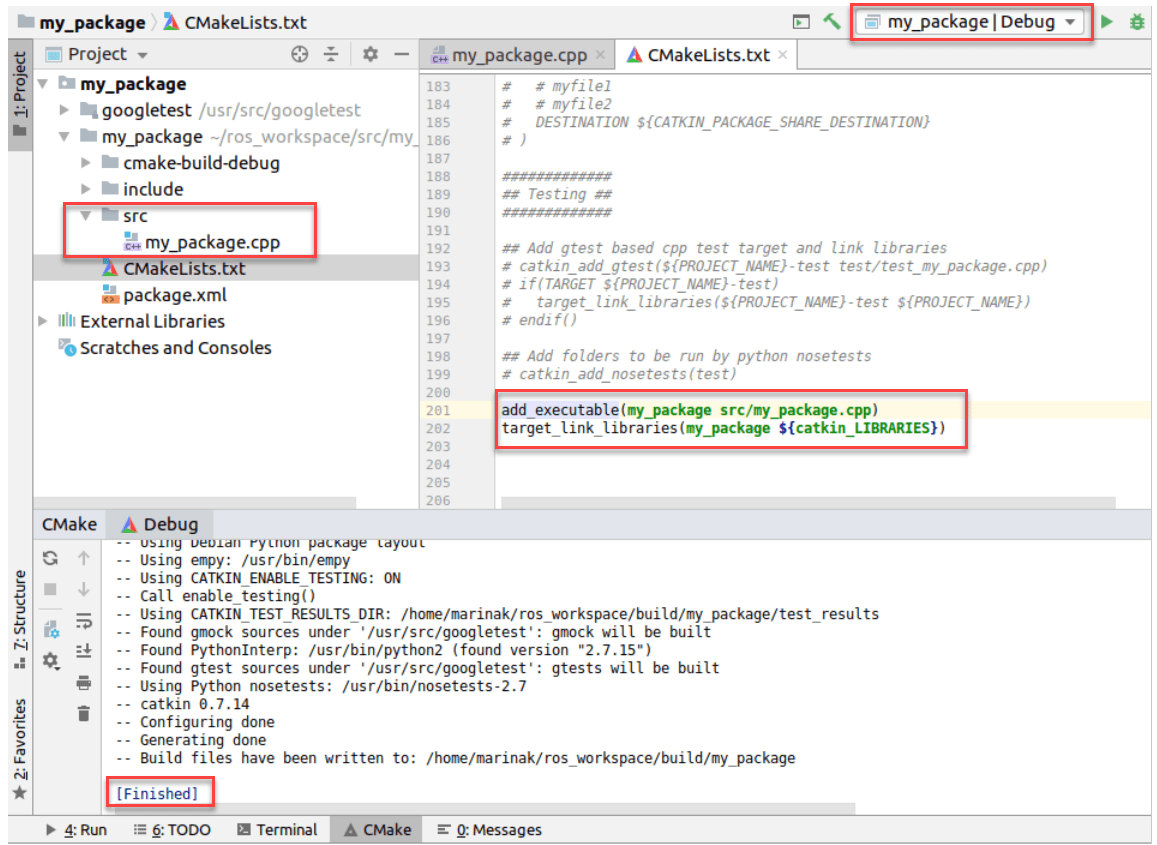
新創建的源添加到的CMakeLists.txt和鏈接其對應程序庫:
add_executable(my_package src/my_package.cpp)
target_link_libraries(my_package ${catkin_LIBRARIES})
之后,重新加載CMake項目,并注意運行/調試配置列表中的my_package:
運行ROS節點
1、在從CLion運行節點之前,在新終端中打開ROS主站:
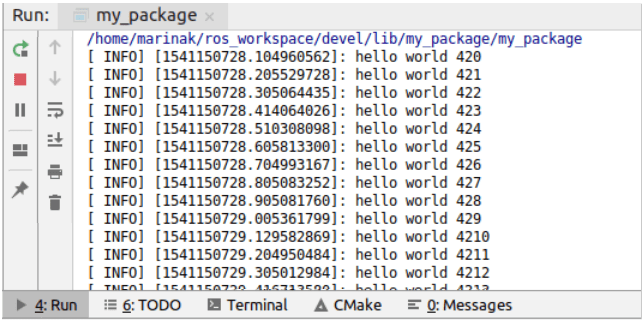
2、在CLion,運行 的my_package配置。運行工具窗口將顯示節點輸出:
的my_package配置。運行工具窗口將顯示節點輸出:
3、在單獨的終端中,檢查當前活動的ROS主題。如果我們打印消息chatter,輸出將類似于我們在CLion中看到的內容:
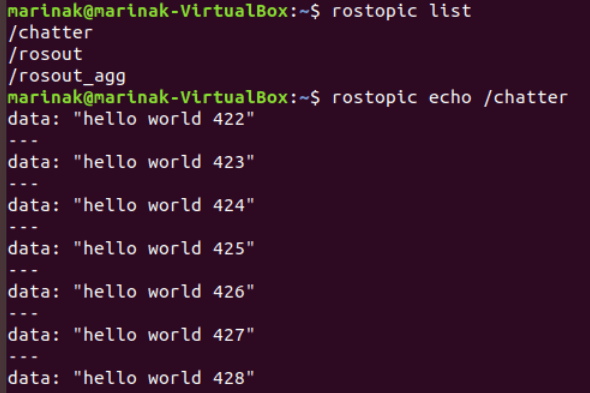
現在,如果我們 在CLion中停止應用程序,該rostopic echo /chatter命令將沒有輸出。
在CLion中停止應用程序,該rostopic echo /chatter命令將沒有輸出。
總結
到此這篇關于Clion ROS開發環境設置技巧的文章就介紹到這了,更多相關Clion ROS開發環境設置內容請搜索腳本之家以前的文章或繼續瀏覽下面的相關文章希望大家以后多多支持腳本之家!
您可能感興趣的文章:- CLion中編譯ROS工程的配置詳細教程
- 如何使用clion中配置ROS工程
- 詳解ubuntu20.04下CLion2020.1.3安裝配置ROS過程說明
- 教你Clion調試ROS包的方法
